Profile Position Mode (pp)
A Target_Position (607A.0H) is applied to the trajectory generator; it generates a Position_demand_value (6062.0H) for the position control loop.
The setting of set-points is controlled by the New_set_point bit and the Change_set_immediately bit of the Controlword and the Set_point_acknowledge bit of the Statusword.
-
If the Change_set_immediately bit is set to 1, a single set-point is expected by the device.
-
If the Change_set_immediately bit is set to 0, a set of set-points is expected by the device.
After a set-point is sent to the slave device, the master device signals that the set-point is valid by a rising edge of the New_set_point bit of the Controlword. The slave device sets to 1 the Set_point_acknowledge bit of the Statusword to indicate that the new set-point has been received. Afterwards the slave device sets to 0 the Set_point_acknowledge bit when the device is ready to accept new set-points.
If one set-point is still in progress and new one is received from the slave device, two methods are supported:
-
Single set-point (Change_set_immediately = 1, bit #5 of Controlword)
The new set-point shall be processed immediately.
-
Set of set-points (Change_set_immediately = 0, bit #5 of Controlword)
The new set-point shall be processed only after the previous has been reached.
Up to two set-points can be set up. If all set-points available are busy (Set_point_acknowledge bit is 1) the reaction of the slave device depends on the Change_set_immediately bit. If it is set to 1, the new set-point shal be processed immediately as single set-point.
The Target_reached bit of the Statusword shall remain to 0 until all set-points are processed.
The trajectory generator support only linear ramp (trapezoidal profile), with separate parameters for acceleration and deceleration.
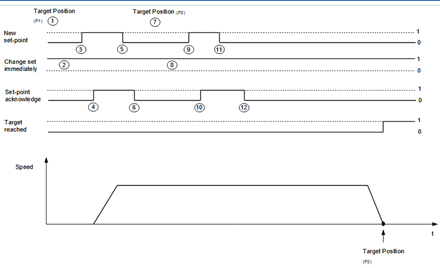
Figure 1-1: Single set-point
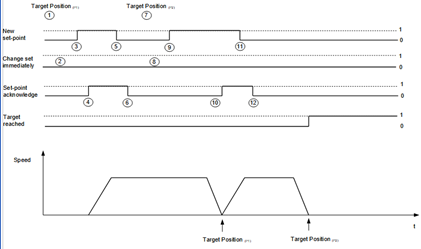
Figure 1-2: Set of set-points
Related objects
|
Index |
Object |
Name |
Type |
Attr. |
M/O |
|---|---|---|---|---|---|
|
6040.0H |
VAR |
UNSIGNED16 |
rw |
M |
|
|
6041.0H |
VAR |
UNSIGNED16 |
ro |
M |
|
|
6062.0H |
VAR |
INTEGER32 |
ro |
O |
|
|
6063.0H |
VAR |
Position_Actual_Internal_Value (Position actual value*) |
INTEGER32 |
ro |
O |
|
6064.0H |
VAR |
INTEGER32 |
ro |
M |
|
|
6065.0H |
VAR |
UNSIGNED32 |
rw |
O |
|
|
6066.0H |
VAR |
UNSIGNED16 |
rw |
O |
|
|
6067.0H |
VAR |
UNSIGNED32 |
rw |
O |
|
|
6068.0H |
VAR |
UNSIGNED16 |
rw |
O |
|
|
607A.0H |
VAR |
INTEGER32 |
rw |
M |
|
|
6081.0H |
VAR |
UNSIGNED32 |
rw |
M |
|
|
6083.0H |
VAR |
UNSIGNED32 |
rw |
M |
|
|
6084.0H |
VAR |
UNSIGNED32 |
rw |
O |
|
|
6085.0H |
VAR |
UNSIGNED32 |
rw |
O |
|
|
6086.0H |
VAR |
INTEGER16 |
rw |
M |
|
|
60F4.0H |
VAR |
INTEGER32 |
ro |
O |
|
|
2010.0H |
VAR |
UNSIGNED16 |
rw |
M |






